
 产品:50
产品:50
 联系我们
联系我们

ABB机器人急停的处理方法——ABB机器人
1)ABB机器人控制柜内右侧有一安全板
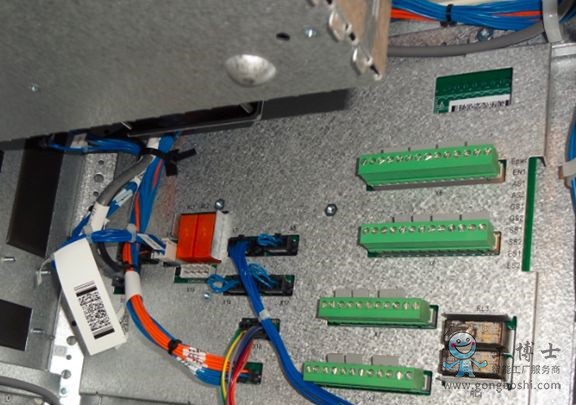

2)其中X1和X2为急停ES1和ES2
3)X5上为GS(一般停止,即任何时候断开机器人就停止)和AS(自动停止,即只有机器人在自动运行时断开回路,机器人会停车,手动断开回路不影响)
4)对于急停回路,如下:

急停默认如上图短接,如果要接入急停,可以断开9和10针脚,接入急停
5)对于常规停止GS自动停止AS如下

2)其中X1和X2为急停ES1和ES2
3)X5上为GS(一般停止,即任何时候断开机器人就停止)和AS(自动停止,即只有机器人在自动运行时断开回路,机器人会停车,手动断开回路不影响)
4)对于急停回路,如下:
急停默认如上图短接,如果要接入急停,可以断开9和10针脚,接入急停
5)对于常规停止GS自动停止AS如下
如果要接入自动停止,可以断开12和11,5和6。注意要同时断开和同时恢复,否则会报“两个通道故障”。
更多资讯:ABB机器人